SEAFLOOR MAPPING SYSTEM
海底マッピングシステム
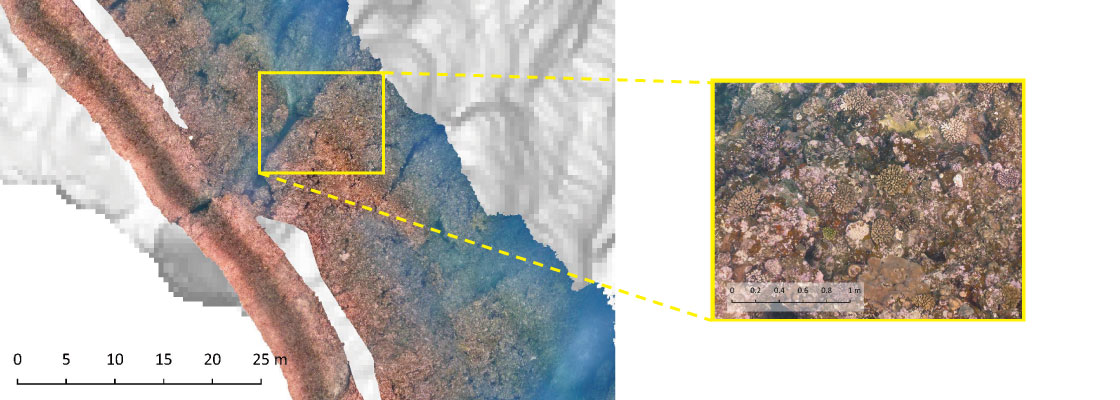
海底のオルソモザイク・3Dモデルを構築、海底マッピングシステム
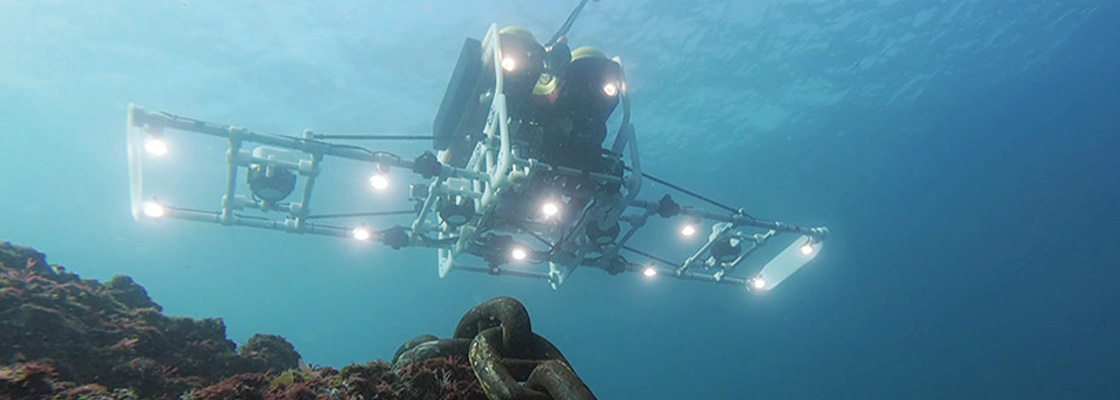
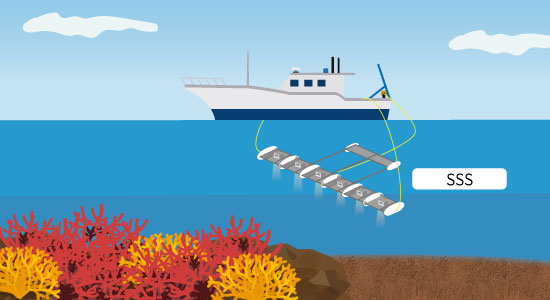
SSS(Speedy Sea Scanner)はフォトグラメトリ技術を用いて、効率的に高分解能な海底のオルソモザイク画像および3Dモデルを構築するシステムです。水深や環境に応じて、2つのラインナップを提供します。
 SSS
SSS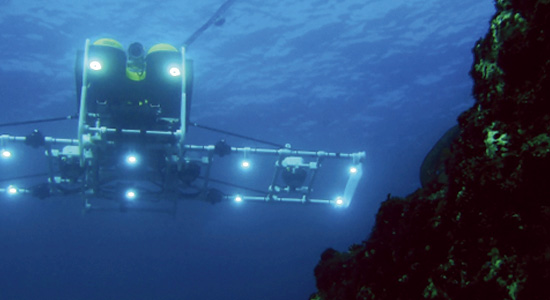 SSS-100
SSS-100海底マッピングシステム比較表
| SSS | SSS-100 | |
| 動力 |
曳航式 |
ROV搭載型 |
| 観測用カメラ数 |
6連カメラアレイ |
4連カメラアレイ |
| 水中測位 |
船上GNSSで測位 |
水中測量装置(USBL)を用いた測位 |
| 最大水深 |
~30m |
~100m |
| その他 |
東京大学 水野勝紀准教授と共同開発 特許取得 (第6855651号) |
SSS-100:ウインディーネットワーク開発 |
SSS
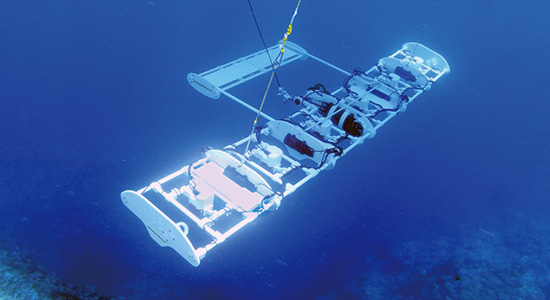
「SSS」は海底オルソ地図を作成するために開発した6連カメラアレイです。海龍で藻類もビデオ撮影画像からピントの合った画像を秒間4コマ程度抽出しオルソかし正確に途切れる事なく連続した画像を生成できます。
「SSS」は東京大学 水野勝紀准教授との共同開発であり、特許(第6855651号)を取得しました。
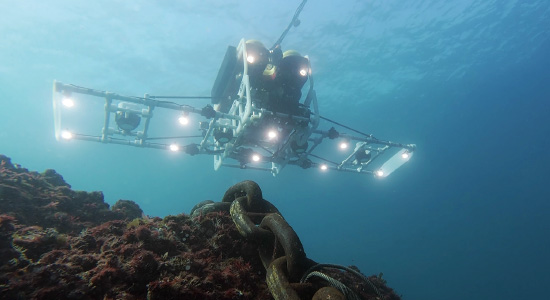
SSS-100
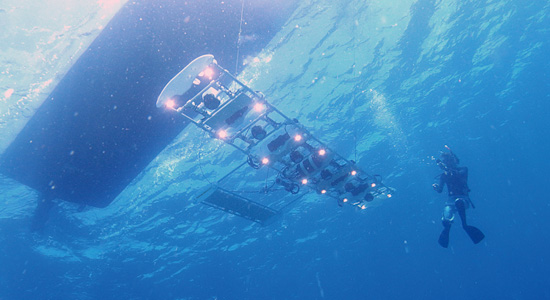
「SSS-100」は、ROVに4つの光学カメラをアレイ状に配置し、フォトグラメトリ技術を用いて高分解能な海底オルソ画像・3Dモデルを構築するシステムです。 水深100mの深度域でも調査が可能で、ダイバーや小型水中ドローンでは困難だった領域のマッピングに対応します。
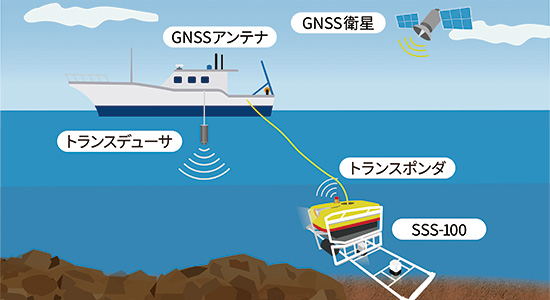
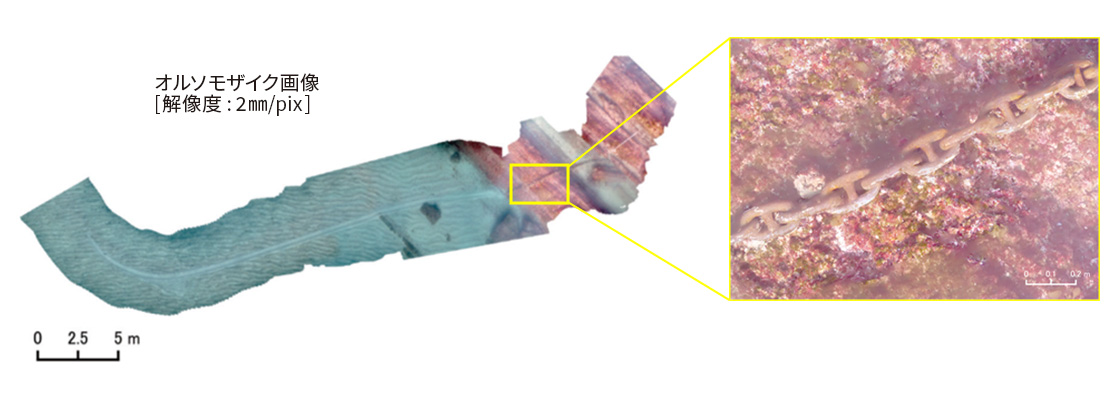
海底敷設物の状況調査例(3次元モデル)
- 特徴
- ■フォトグラメトリ技術による高分解能オルソ画像生成
■最大水深100m対応
■広域マッピング
■効率性向上(ダイバー作業比)
- 用途
- ■ケーブルの損傷や設置状況のモニタリングおよびデータ化
■海底遺跡調査およびデータ化
■設置エリアの視覚的・解析的評価
調査機器一覧
基盤技術(測量・計測)
海洋調査技術
調査船