沼津土木事務所様ご来社 技術研修会を開催
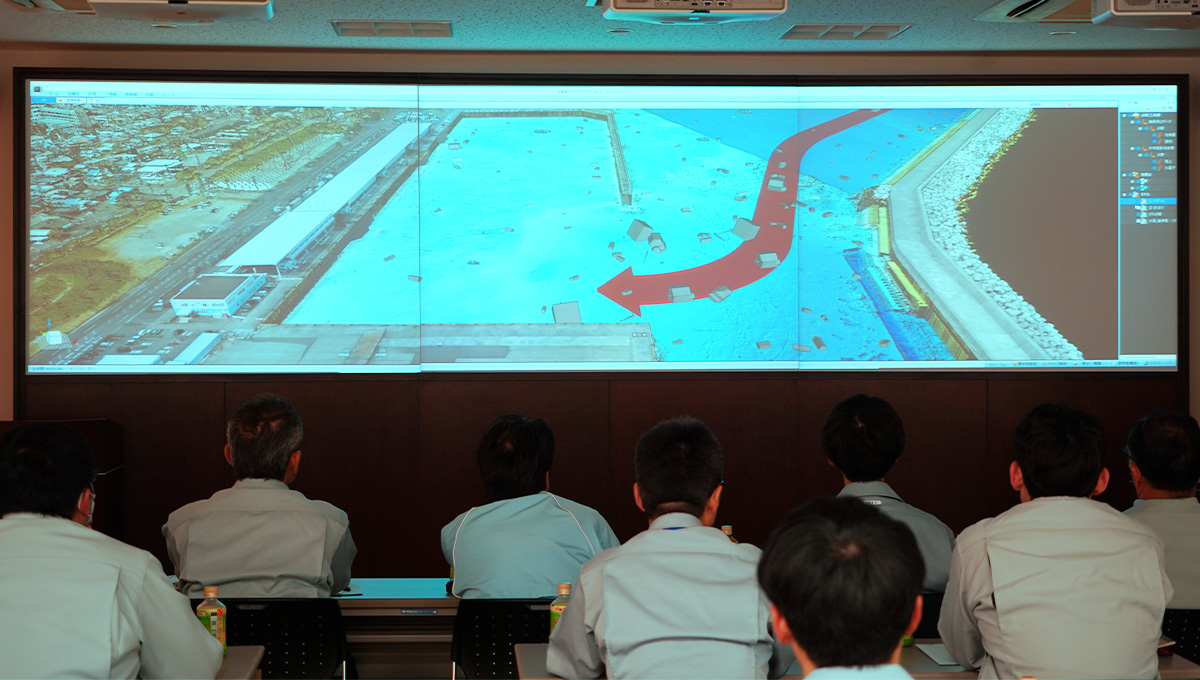
研修会の概要と実施内容 2026年2月13日(金)、沼津土木事務所所長ほか計12名の皆様にご来社いた...
BLOG
研修会の概要と実施内容 2026年2月13日(金)、沼津土木事務所所長ほか計12名の皆様にご来社いた...

視察の概要と紹介内容 2026年1月30日(金)、下田海上保安部の皆様にご来社いただきました。 当日...
技術研修の概要と紹介内容 2025年12月11日(木)、熱海土木事務所の皆様が技術研修のため来社され...

地域イベントを通じて広がる未来都市と環境体験 ウインディーネットワークは、測量・調査で培った 3D点...

静岡県職員向けに最新デジタル技術を実演・解説 2025年11月26日、ウインディーネットワークは静岡...
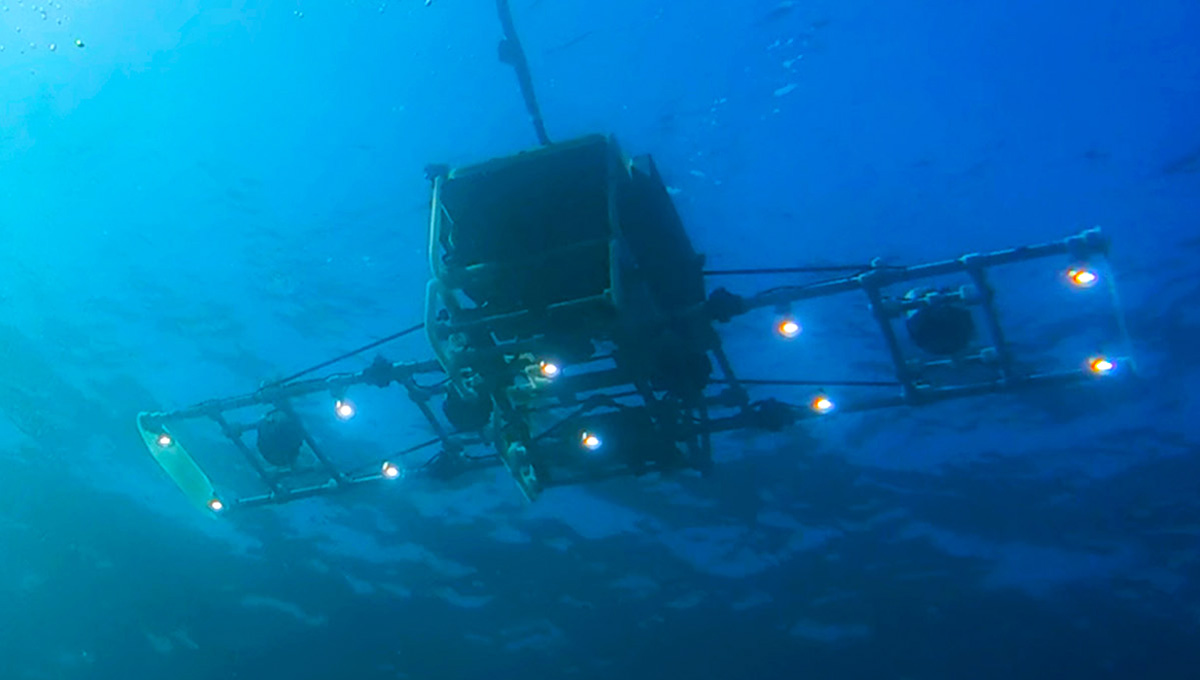
60〜80mの深度で水中画像と地形データを取得 滋賀県が発表した「葛籠尾崎湖底遺跡(琵琶湖・長浜市)...

静岡・福島を結ぶ運用で、場所を問わない遠隔操作性 令和7年11月19日(水)、ウインディーネットワー...
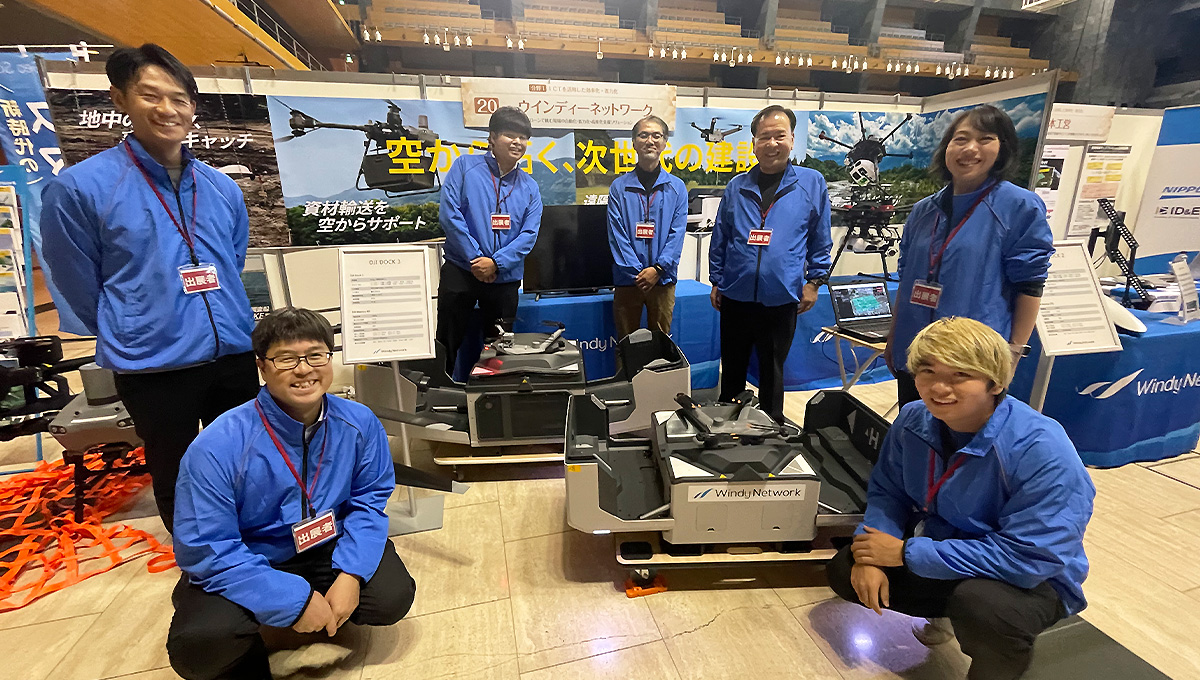
生産性向上を支えるDXソリューションを展示 ウインディーネットワークは2025年11月14日(金)に...

「2025 土木の日」に参加しました 2025年11月8日(土)、ウインディーネットワークは下田市で...

令和7年度 静岡県・焼津市・藤枝市総合防災訓練に参加 2025年10月19日(日)、当社は焼津市で実...